



Moscow, Russian Federation
Russian Federation
Tochnaya vizualizaciya anatomicheskoy tochki-misheni i korrektnoe provedenie elektroda yavlyayutsya kriticheski vazhnymi usloviyami uspeshnogo vypolneniya neyromodulyacionnyh vmeshatel'stv, odnako takie procedury, kak sakral'naya neyrostimulyaciya (SNRS) i stimulyaciya krylonebnogo gangliya (SPGS), chasto oslozhnyayutsya ogranicheniyami standartnoy flyuoroskopii, obuslovlennymi summaciey kostnyh struktur i proekcionnymi iskazheniyami, osobenno u pacientov s povyshennym indeksom massy tela. Cel'yu nastoyaschego issledovaniya byla ocenka primenimosti tehnologii dopolnennoy real'nosti (AR) kak instrumenta povysheniya tochnosti implantacii elektrodov pri SNRS i SPGS. Ispol'zovanie AR-navigacii, obespechivayuschey proekciyu trehmernyh anatomicheskih modeley i zaranee rasschitannoy traektorii neposredstvenno na operacionnoe pole, pozvolilo uluchshit' vizualizaciyu individual'nyh anatomicheskih osobennostey i obespechit' bolee tochnoe sledovanie planiruemomu hirurgicheskomu dostupu, chto demonstriruet potencial tehnologii v preodolenii ogranicheniy dvuhmernoy flyuoroskopii. Poluchennye dannye svidetel'stvuyut o perspektivnosti vnedreniya AR-navigacii v klinicheskuyu praktiku dlya povysheniya tochnosti neyromodulyacionnyh vmeshatel'stv, odnako neobhodimy dal'neyshie issledovaniya dlya podtverzhdeniya ee effektivnosti i razrabotki standartizirovannyh protokolov primeneniya.
AR-navigation, sacral nerve root stimulation, sphenopalatine ganglion stimulatio
Введение
Одним из ключевых условий успешного выполнения нейромодуляционных вмешательств является максимально точная визуализация целевой анатомической области и последующее проведение электрода строго в обозначённую точку. Поэтому развитие технологий нейромодуляции напрямую связано с прогрессом в области нейровизуализации. Наибольшие технические трудности возникают при выполнении таких процедур, как сакральная нейростимуляция (SNRS) и стимуляция крылонёбного ганглия (SPGS). Использование стандартной флюороскопии в ряде случаев оказывается ограниченным из-за суммации костных структур и неизбежных проекционных искажений, что существенно осложняет идентификацию ключевых анатомических ориентиров. Эта проблема становится особенно выраженной у пациентов с высоким индексом массы тела [1,2].
Технология дополненной реальности (AR) позволяет интегрировать трёхмерные анатомические модели и заранее рассчитанную траекторию доступа непосредственно в поле зрения хирурга. AR-навигация уже показала свою клиническую состоятельность в нейрохирургии и смежных дисциплинах [3–7].
Настоящее исследование направлено на оценку возможностей использования AR-навигации как вспомогательного инструмента при имплантации электродов для SNRS и SPGS.
Материалы и методы
В рамках данного проспективного одноцентрового обсервационного исследования была проведена оценка применимости и эффективности технологии навигации с использованием дополненной реальности (AR) при установке электродов для сакральной нейростимуляции (SNRS) и стимуляции крылонёбного ганглия (SPGS). Все хирургические вмешательства выполнялись двумя нейрохирургами — первыми двумя авторами работы — на базе ФГАУ «НМИЦ нейрохирургии им. Н.Н. Бурденко» (Москва) в период с апреля по август 2025 года.
В исследование включено четыре пациента: у трёх была выполнена первичная имплантация системы SNRS по поводу резистентных нарушений функции тазовых органов, у одного — повторная установка электрода SPGS вследствие миграции ранее имплантированного устройства и возобновления приступов кластерной головной боли.
Все участники исследования подписали информированное добровольное согласие, соответствующее принципам Хельсинкской декларации. Это обеспечивало соблюдение всех этических требований и приоритетную защиту прав и безопасности пациентов на протяжении всего периода наблюдения.
Критерии включения:
- Возраст старше 18 лет;
- Наличие показаний для применения нейромодуляции;
- Информированное добровольное согласие пациента на операцию;
- Отсутствие противопоказаний к операции.
Во всех клинических случаях технология навигации с дополненной реальностью применялась как вспомогательный инструмент на этапах планирования доступа и ориентации при проведении электрода, тогда как окончательная верификация положения имплантата осуществлялась методом стандартной интраоперационной флюороскопии.
Перед выполнением вмешательства каждому пациенту проводилось предоперационное КТ-сканирование соответствующей анатомической зоны с предварительной установкой рентгеноконтрастных ориентиров (fiducial markers). При подготовке к процедурам сакральной нейростимуляции (SNRS) выполнялась КТ пояснично-крестцового отдела позвоночника, а четыре метки устанавливали в ромбовидной конфигурации в проекции поясничной области (Рисунок 1).
В случае операций по стимуляции крылонёбного ганглия (SPGS) проводилось КТ головы; при этом от применения fiducial-меток отказались, поскольку для регистрации использовали стабильные и чётко определяемые наружные анатомические ориентиры — такие как кончик носа, латеральный край орбиты и глабелла.
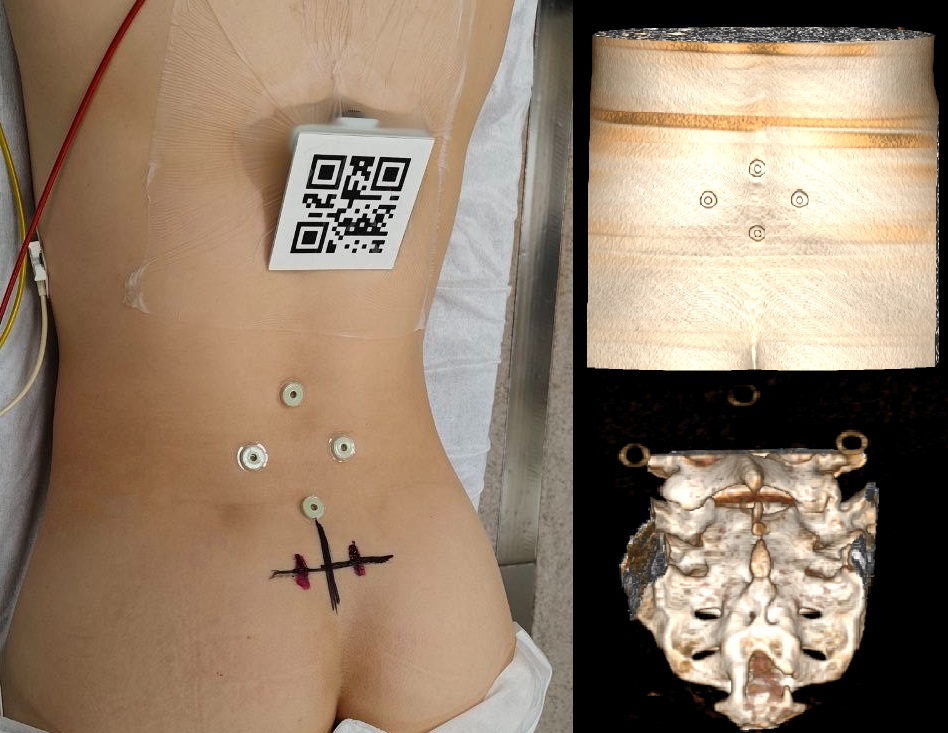
Рисунок 1. Расположение Fiducial-меток для SNRS на пациенте и по 3D-КТ.
Сегментация и построение трехмерной модели крестца и черепа выполнялись с использованием программы Inobitec DICOM Viewer. (Рисунок 2)
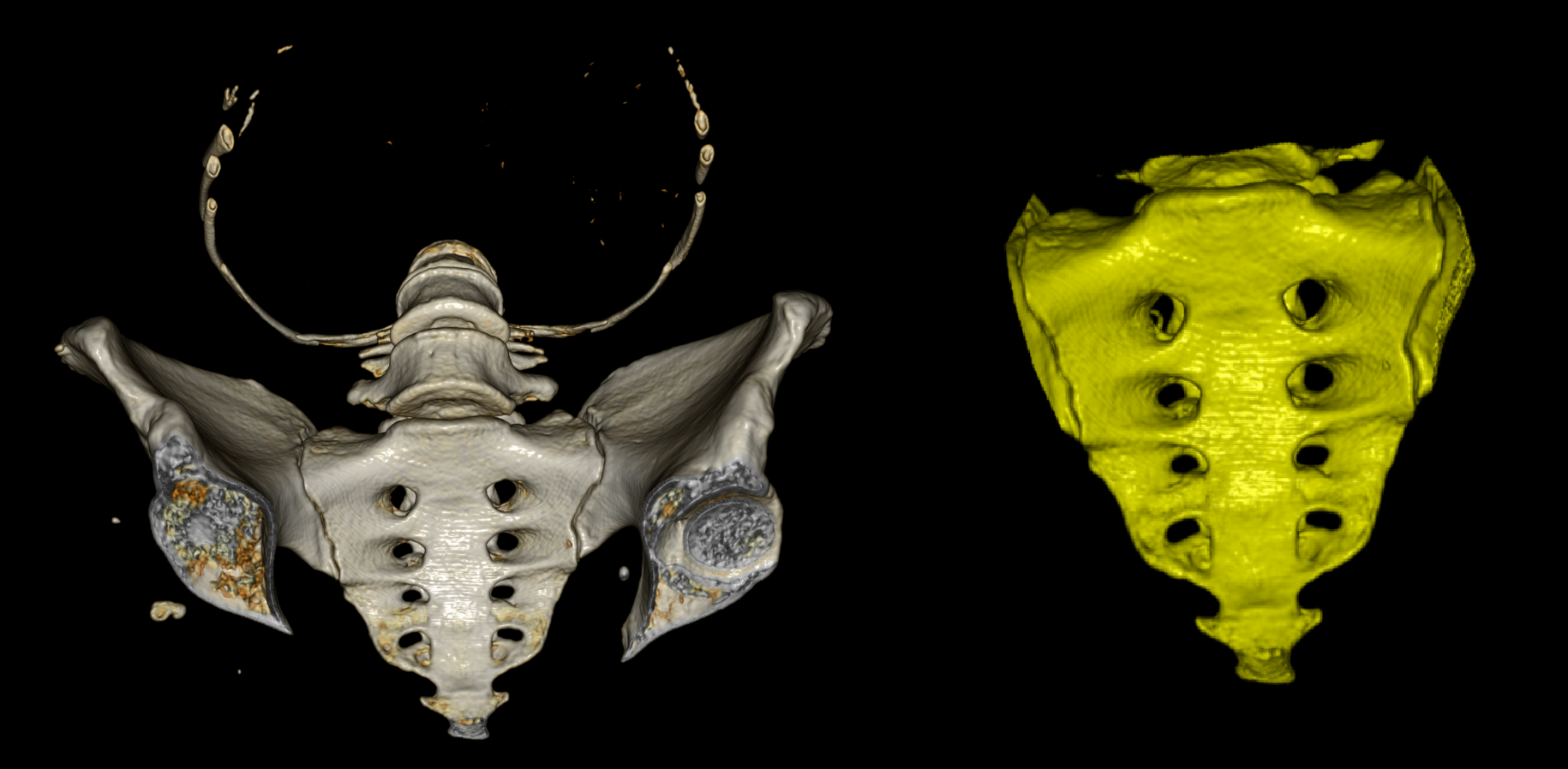
Рисунок 2. Создание 3D модели и её сегментация в Inobitec DICOM Viewer для последующей обработки. Слева – 3D реконструкция интраоперационного КТ. Справа – сегментированная модель поверхности крестца.
Для навигации в операционной использовалась система на базе очков дополненной реальности Microsoft HoloLens® 2, интегрированная со специализированным программным обеспечением Medgital. Построенная предоперационно трёхмерная модель анатомических структур проецировалась на операционное поле в реальном времени и совмещалась с телом пациента посредством регистрации по рентгеноконтрастным меткам. Для поддержания стабильной пространственной привязки модели применялся QR-код, который фиксировался на коже пациента вне области хирургического доступа и оставался в зоне прямой видимости на протяжении всего вмешательства (рисунок 1).
Точность совмещения виртуальной модели с QR-кодом оценивали на основании показателя Fiducial Registration Error (FRE). Его рассчитывали по смещению трёхмерных точек модели относительно реальных fiducial-меток. Первичные замеры проводились в пикселях с последующим переводом результатов в миллиметры.
После финального упрощения 3D-структур и подбора масштаба модель экспортировалась в формат GLB, совместимый с устройством Microsoft HoloLens 2 и программной платформой Medgital. Среднее время, необходимое для подготовки итоговой GLB-модели после выполнения интраоперационной КТ, составляло около 30 минут.
Использование технологии дополнённой реальности обеспечивало непрерывную 3D-визуализацию в реальном времени: сегментированная анатомическая модель (черепа или крестца) оставалась совмещённой с телом пациента на всём протяжении операции. Система отображала рассчитанную траекторию введения иглы к целевой зоне и контролировала положение инструмента, автоматически предупреждая хирурга об отклонении кончика иглы от планируемого пути более чем на 1 мм — при превышении порога цвет проецируемой линии изменялся с зелёного на жёлтый (рисунок 3).

Рисунок 3. Визуализация совпадения траектории иглы с запланированной траекторией. При их точном совпадении траектория отображается зеленым цветом, при отклонении более, чем на 1 мм траектория меняет свой цвет на жёлтый.
Поскольку настоящее исследование представляет собой серию клинических наблюдений, имеющих характер подтверждения концепции, основное внимание было уделено детальному описанию методики и оценке возможностей её практического применения. Показатели FRE представлены в виде средних значений с указанием стандартного отклонения (SD).
Ключевой целью была оценка потенциальной точности AR-навигации при проведении иглы к целевой зоне имплантации, причём акцент делался на возможности выполнения этого этапа без использования интраоперационной флюороскопии.
Результаты
Среднее значение ошибки регистрации (Fiducial Registration Error, FRE), отражающее степень соответствия виртуальной модели реальным анатомическим структурам, составило 3,5 ± 1,75 мм. Такое отклонение можно считать клинически допустимым для выполнения точной имплантации в заданную область.
Мы также отметили, что точность совмещения значительно возрастает при проведении вмешательства в условиях КТ-операционной, поскольку это позволяет избежать погрешностей, связанных с перемещением пациента между этапами навигации и визуализации. Дополнительным фактором, обеспечивающим стабильную регистрацию AR-модели, является выполнение операции под общей анестезией — отсутствие непроизвольных движений полностью устраняет динамические артефакты и повышает точность позиционирования.
Имплантация электрода для стимуляции крестцовых корешков
Во всех трёх наблюдениях имплантация электрода для SNRS с применением AR-навигации была выполнена успешно. Используя визуализированную траекторию (рис. 4) и корректируя направление иглы при малейших отклонениях от намеченного пути, удавалось без затруднений выйти на область крестцового отверстия S3 с медиальной стороны и затем выполнить правильное размещение электрода. Точность позиционирования подтверждалась финальным рентгенологическим контролем в завершении вмешательства (рисунок 5).
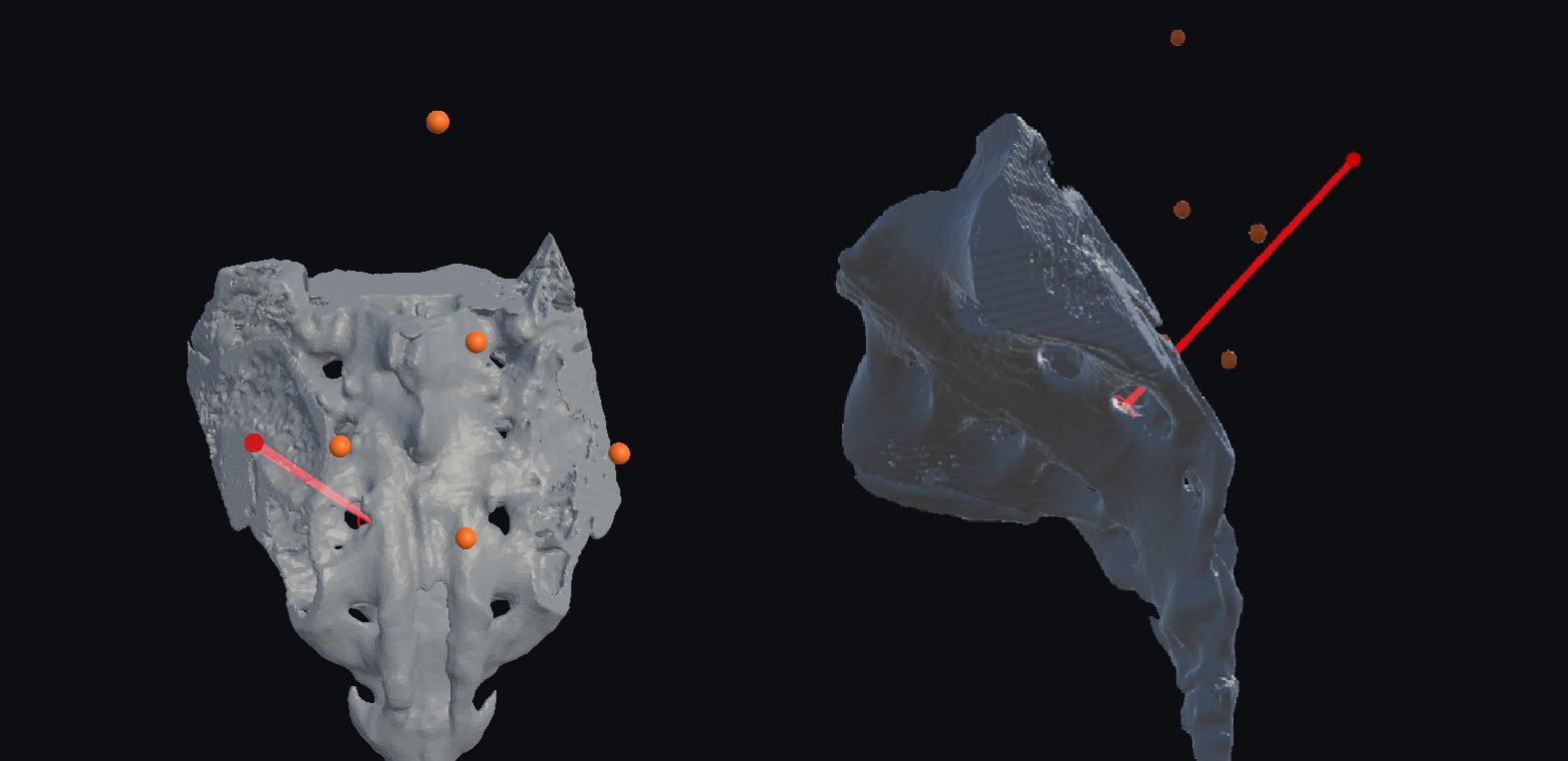
Рисунок 4. Запланированная траектория для SNRS на 3D- модели крестца пациента.
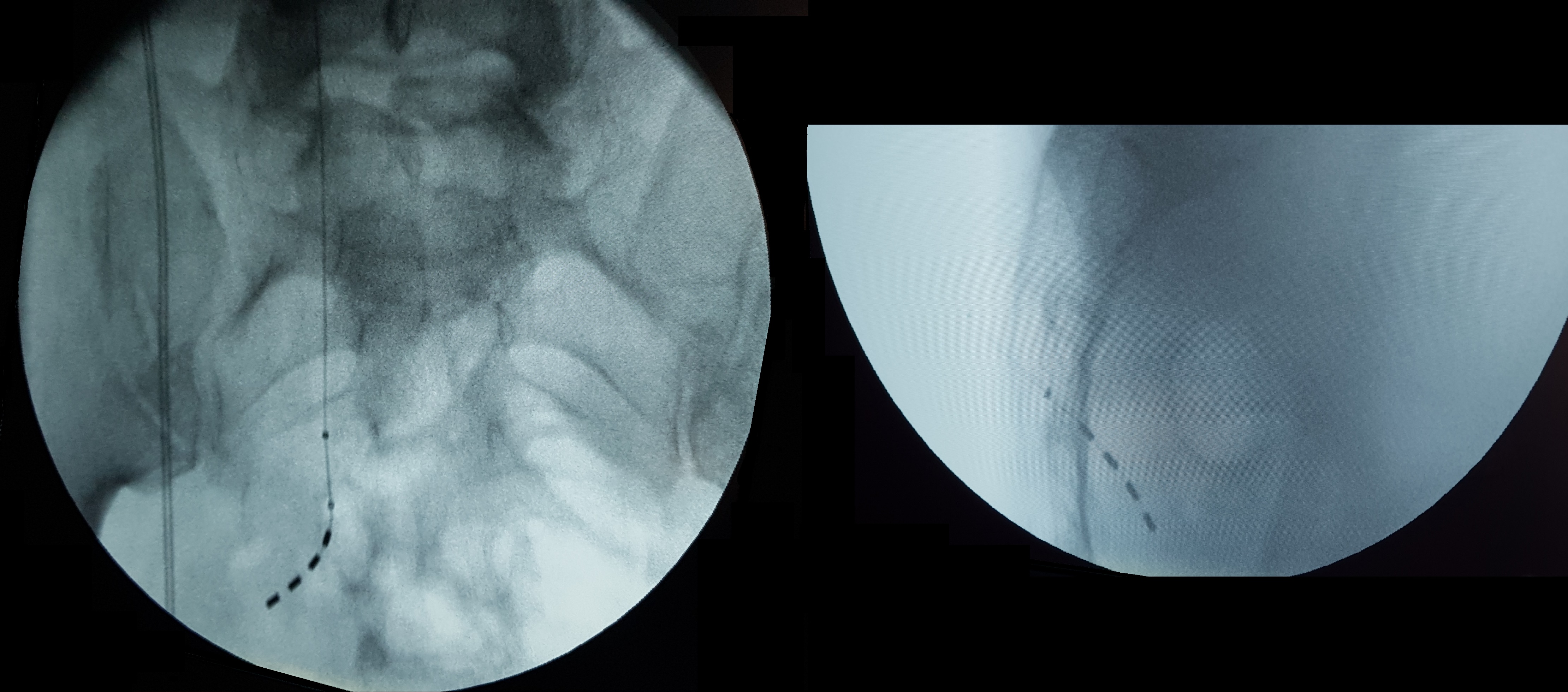
Рисунок 5. Рентгенологический контроль расположения электрода в S3 отверстии справа.
Имплантация электрода для стимуляции крылонёбного ганглия
При выполнении данной операции применение навигации с дополненной реальностью оказалось даже более результативным. Точное следование заранее рассчитанной траектории введения инструмента (рис. 6) обеспечило оптимальное расположение электрода в крылонёбной ямке, что впоследствии сопровождалось выраженным положительным клиническим результатом. Корректность положения стимуляционной иглы была подтверждена интраоперационной флюороскопией, после чего произведена имплантация четырёхконтактного электрода. Финальная позиция системы была дополнительно верифицирована по данным послеоперационной компьютерной томографии (рисунок 7).

Рисунок 6. Запланированная траектория имплантации электрода для SPGS.
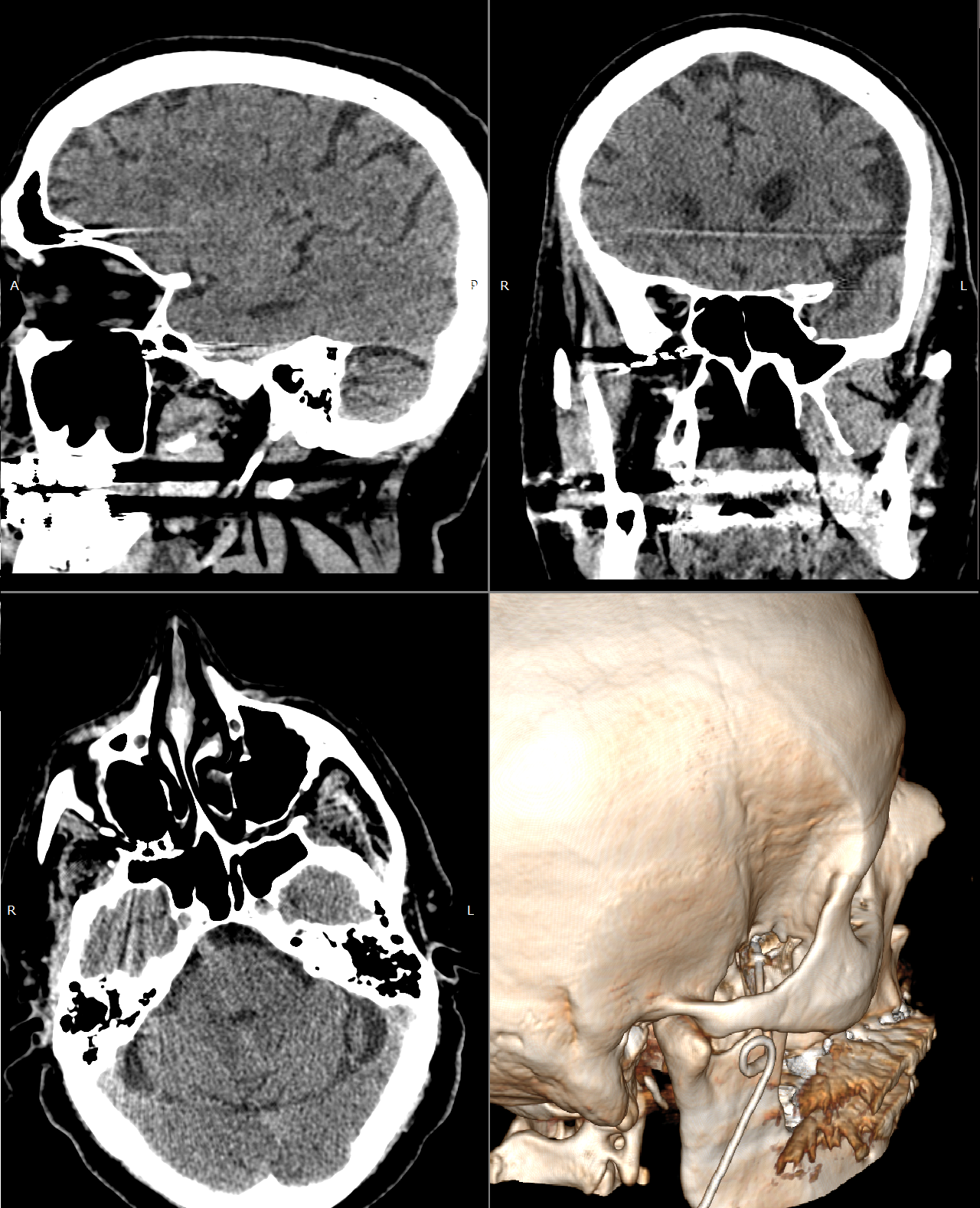
Рисунок 7. КТ- контроль положения электрода для SPGS. Видно, как электрод располагается полностью в крыловидно-нёбной ямке справа.
Поскольку рентгенологический контроль в данном случае был ограничен выполнением нескольких статических снимков в прямой и боковой проекциях, он использовался исключительно для подтверждения окончательной позиции электрода. Суммарное время флюороскопии составило 0,1 ± 0,1 мин, а средняя эффективная доза облучения — 0,7 ± 0,5 мЗв. Эти показатели значительно ниже типичных значений для аналогичных вмешательств, особенно при сложных клинических условиях, когда длительность флюороскопии может достигать нескольких минут [8,9].
Обсуждение
Ключевым преимуществом применения технологий дополненной реальности при нейромодуляционных вмешательствах является возможность получать трёхмерное представление об индивидуальных анатомических структурах пациента непосредственно в ходе операции. В отличие от флюороскопии, которая формирует двумерное, суммационное изображение, AR-навигация позволяет хирургу точно оценивать пространственные характеристики целевых областей — включая направление, глубину и истинные размеры крестцовых отверстий либо входа в крылонёбную ямку. Такая объёмная визуализация обеспечивает более глубокое понимание анатомии в реальном времени и значительно повышает точность планирования и исполнения хирургического доступа.
Важно подчеркнуть, что первоначальный этап освоения технологии сопровождался и неудачными попытками, не включёнными в текущий анализ. В случаях, когда точность совмещения виртуальной модели с телом пациента оказывалась недостаточной или происходило смещение модели во время операции, выполнение вмешательства продолжалось по стандартной методике под контролем флюороскопии. Это и является причиной исключения таких случаев из данной серии наблюдений.
Основные причины неудачи и способы их предотвращения были:
1. Миграция рентгеноконтрастных меток (fiducials)
Причина: Смещение меток между предоперационной КТ и этапом интраоперационной регистрации.
Решение: Оптимизация точности навигации может быть достигнута путём выполнения интраоперационной КТ непосредственно перед началом AR-навигации, что минимизирует временную задержку между визуализацией и регистрацией. Альтернативный вариант — проведение регистрации без рентгеноконтрастных меток, ориентируясь на стабильные естественные анатомические ориентиры, как это осуществлялось при вмешательствах на SPGS.
2. Смещение пространственной привязки AR-модели
Причина: Надёжность навигации снижалась в ситуациях, когда референсный QR-код фиксировался при помощи шарнирного держателя и мог смещаться в ходе операции. Поскольку виртуальная модель анатомии была жёстко привязана к положению этого маркера, любое его смещение автоматически приводило к потере точности проекции.
Решение: Надёжность позиционирования обеспечивалась путём жёсткой фиксации QR-кода непосредственно на коже пациента в непосредственной близости от зоны вмешательства, используя гипоаллергенный адгезивный материал (инцизионную плёнку). Такой подход полностью исключал применение подвижных держателей и устранял риск смещения маркера.
В ряде наблюдений возникающее смещение виртуальной модели удавалось устранить путём повторной регистрации. Однако если восстановить точное соответствие в короткие сроки не представлялось возможным, выполнение процедуры переводили на традиционный флюороскопический контроль.
Таким образом, на основании полученного опыта можно выделить несколько ключевых условий, необходимых для успешного применения AR-навигации при нейромодуляционных вмешательствах:
- Необходимо максимально сокращать интервал между выполнением КТ и регистрацией модели — вплоть до проведения КТ непосредственно в операционной, если такая возможность доступна.
- QR-код должен быть надёжно зафиксирован прямо на коже пациента в непосредственной близости от зоны вмешательства, что обеспечивает его полную неподвижность на протяжении всей процедуры.
- Ключевым фактором успешной навигации является детальное предоперационное планирование траектории доступа и строгое её соблюдение во время операции. Именно этот этап во многом определяет точность установки электрода и достижение требуемого клинического результата.
Следует также учитывать и существующие на сегодняшний день ограничения технологии AR-навигации при нейромодуляционных вмешательствах:
- Требования к подготовке специалистов.
Использование метода предполагает владение базовыми принципами 3D-сегментации, навыками создания и обработки виртуальных моделей, а также уверенную работу с устройствами дополненной реальности. Недостаточный уровень подготовки может отражаться на точности и воспроизводимости результатов.
- Параллакс-эффект:
Как и большинство проекционных систем дополненной реальности, технология подвержена параллакс-эффекту: визуальное положение 3D-модели относительно реального объекта смещается при изменении угла обзора. Привязка виртуальной модели к QR-коду частично компенсирует эту ошибку, однако при быстром перемещении AR-устройства возможна кратковременная задержка обновления изображения.
- Перегрузка визуализации:
При избыточном количестве отображаемых структур может возникать ухудшение видимости ключевых анатомических ориентиров. Для уменьшения визуального шума мы используем регулировку степени прозрачности модели и снижение интенсивности подсветки траектории, что повышает читаемость изображения.
- Ограничение контроля глубины имплантации.
Одним из основных текущих недостатков метода является отсутствие возможности прямой оценки глубины расположения электрода и его точного положения в толще тканей в режиме AR. Для этих задач по-прежнему необходим флюороскопический контроль. Тем не менее данное ограничение не снижает общемедицинской ценности AR-навигации, поскольку технология обеспечивает высокоточное наведение и позиционирование стимуляционной иглы в целевую точку — этап, критически важный для корректной дальнейшей имплантации электрода.
Небольшой размер выборки не позволяет сделать статистически обоснованные выводы, однако представленные предварительные результаты указывают на значительный потенциал использования AR-навигации в процедурах нейромодуляции. Для решения задач стандартизации методики и формирования многоцентровой доказательной базы представляется целесообразным создание международного консорциума, который мог бы разработать единые протоколы применения технологий дополненной реальности в нейрохирургии.
Такая инициатива должна включать разработку открытого программного обеспечения, унифицированных методик регистрации и проверки точности, а также создание структурированных баз данных. Накопление крупных однородных массивов данных станет основой для дальнейшего применения алгоритмов машинного обучения, направленных на повышение точности и предсказуемости хирургических вмешательств.
Заключение
AR-навигация обеспечивает принципиально иной уровень интраоперационной визуализации, позволяя проецировать трехмерную анатомическую модель непосредственно на операционное поле. Такой подход даёт хирургу возможность в режиме реального времени учитывать индивидуальные анатомические особенности пациента, точно ориентироваться в пространстве и строго придерживаться заранее рассчитанной траектории доступа, оперативно корректируя любое отклонение инструмента.
Одним из ключевых преимуществ метода является значительное сокращение длительности интраоперационной флюороскопии, что сопровождается заметным снижением лучевой нагрузки как для пациента, так и для хирургической команды. В представленной серии наблюдений средняя дозовая нагрузка составила 0,7 ± 0,5 мЗв, что существенно ниже привычных значений, регистрируемых при выполнении аналогичных процедур под постоянным рентгенологическим контролем.
Несмотря на очевидные преимущества, технология имеет и ряд ограничений — среди них эффект параллакса, риск перегрузки визуального поля при избыточном количестве отображаемых структур и невозможность контроля глубины расположения электрода исключительно средствами AR, что требует обязательной финальной рентгенологической проверки. Будущее развитие метода связано с интеграцией электромагнитного трекинга (EM-tracking), улучшением алгоритмов автоматической сегментации тканей и проведением широкомасштабных сравнительных исследований, способных сформировать убедительную доказательную базу.
Таким образом, технологии дополненной реальности открывают путь к переходу от традиционной 2D-флюороскопии к полноценной 3D-навигации в реальном времени в области нейромодуляции. Последовательное устранение технических ограничений и стандартизация подходов могут в перспективе превратить AR-навигацию в метод выбора при сложных имплантациях, обеспечивая максимально возможную точность и высокий уровень безопасности.
1. Hanna TN, Sadiq M, Ditkofsky N, et al. Sacrum and Coccyx Radiographs Have Limited Clinical Impact in the Emergency Department. AJR Am J Roentgenol. 2016;206(4):681-686. doihttps://doi.org/10.2214/AJR.15.15095
2. Uppot R. N. (2018). Technical challenges of imaging & image-guided interventions in obese patients. The British journal of radiology, 91(1089), 20170931. https://doi.org/10.1259/bjr.20170931
3. Dadario N, Quinoa T, Khatri D, Boockvar J, Langer D, Randy (2021) Examining the benefits of extended reality in neurosurgery: a systematic review. J Clin Neurosci 94:41–53. https://doi.org/10.1016/j.jocn.2021.09.037 EDN: https://elibrary.ru/RBGZMI
4. Contreras López WO, Navarro PA, Crispin S (2019) Intraoperative clinical application of augmented reality in neurosurgery: a systematic review. Clinical Neurology and Neurosurgery. 177:6–11 DOI: https://doi.org/10.1016/j.clineuro.2018.11.018
5. Freidin D, Zilka N, Horesh N, Saukhat O, Ram E, Tejman-Yarden S. Using Augmented Reality for Intraoperative Guidance During Sacral Neuromodulation System Implantation. Ann Surg Open. 2022;3(1):e138. Published 2022 Feb 23. doihttps://doi.org/10.1097/AS9.0000000000000138 EDN: https://elibrary.ru/ICQQGX
6. Konovalov A, Bykanov A, Okishev D, et al. Augmented reality intraoperative tractography for diffuse glioma resection adjacent to the corticospinal tract: a case series with preliminary results. Neurosurg Rev. 2025;48(1):556. Published 2025 Jul 10. doihttps://doi.org/10.1007/s10143-025-03709-5 EDN: https://elibrary.ru/VAPCEZ
7. Hey G, Guyot M, Carter A, Lucke-Wold B. Augmented Reality in Neurosurgery: A New Paradigm for Training. Medicina. 2023; 59(10):1721. https://doi.org/10.3390/medicina59101721 EDN: https://elibrary.ru/EMONMM
8. Alabbad, A., Abdo, E., & Hassouna, M. (2019). Is radiation exposure during sacral neuromodulation within safety limits?. Canadian Urological Association journal = Journal de l'Association des urologues du Canada, 13(3), E95–E96. https://doi.org/10.5489/cuaj.5262
9. Burns RT, Orzel J, Wadensweiler P, et al. Radiation exposure during sacral neuromodulation lead placement: Multi-institutional descriptive study. Neurourol Urodyn. 2024;43(3):595-603. doihttps://doi.org/10.1002/nau.25408 EDN: https://elibrary.ru/CZHQVP